Вот, посмотрите на этого богомола. Теперь посмотрите на фото нашего робота ниже.
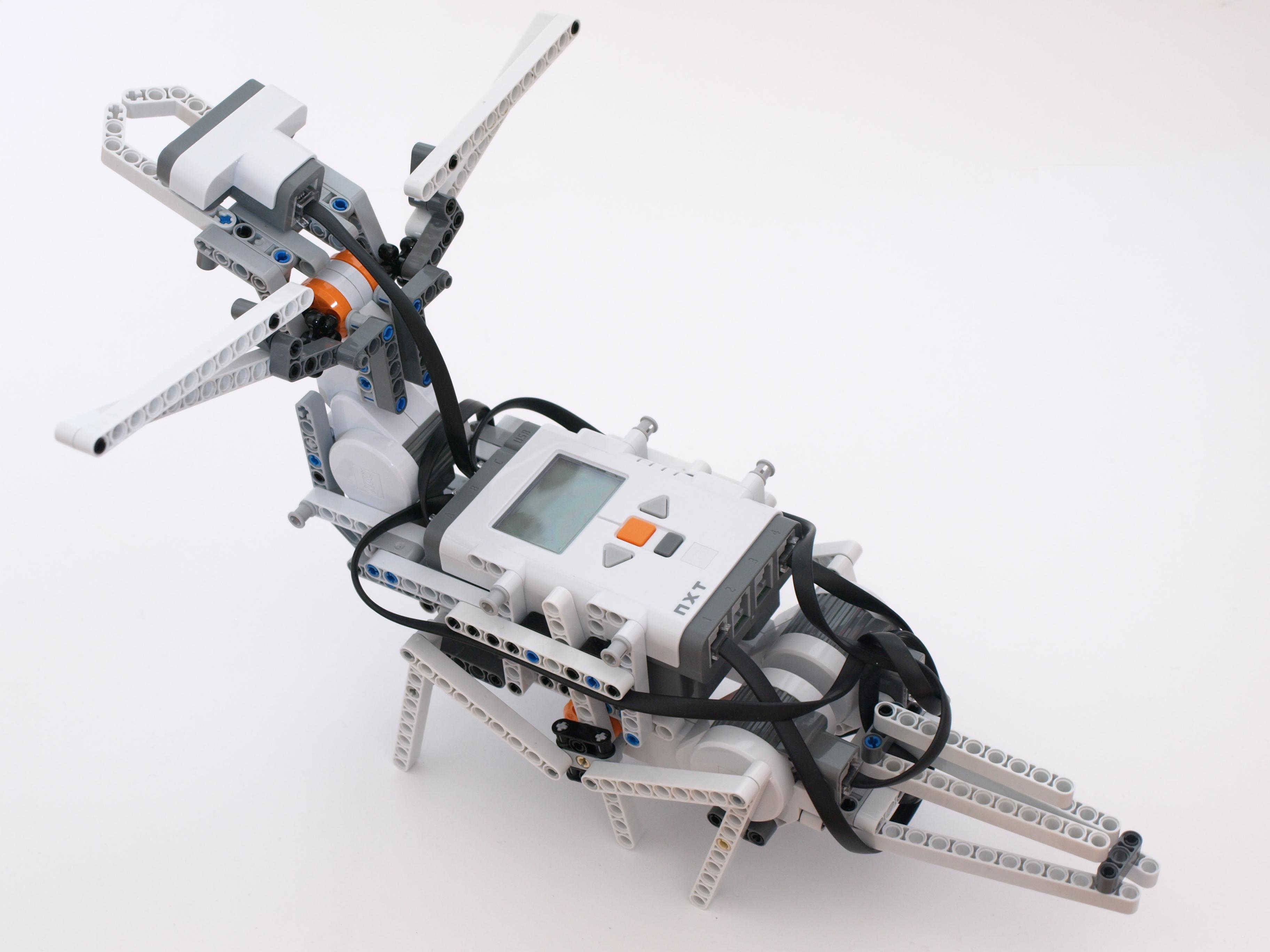
Есть схожесть ведь правда? Вот! Автор молодец!
Возьмите Ваш NXT 2.0 набор и переверните его, чтобы вы могли увидеть обратную сторону.
Слева вы найдете два очень маленьких роботов, один из которых - МАНТИ!
Это одна из бонусных официальных MINDSTORMS моделей NXT 2.0. МАНТИ -
застенчивый робот-животное, которое ходит и радуется жизни, пока не
увидит
кулак (а Вы ему покажите). Когда это бедное существо всё-таки увидит
кулак,
то он сразу опускает голову и отворачивается. Затем снова начинает
весело ходить в новом направлении.
На данной странице мы расскажем вам о МАНТИ, его структуре, опубликуем инструкции по программированию и сборке этого робота..
О дизайне
Раньше в рамках программы разработчиков роботов "MINDSTORMS ЮНИОР" роботов собирали
кто из чего. У кого то был ЛЕГО-ТЕХНИКС, у кого то NXT 1.0.
Так вот, я увлекался созданием роботов собрал "нечто" из тех деталей, что были у него с собой.
Изначально целью было просто создать шагающего робота, который ходил бы хорошо.
Для достижения этой цели, я воссоздал шагающего робота, который я
разработал и ранее, но которые так и не был показан в Интернете.
После того, как робот смог ходить должным образом, я начал доделывать внешний
вид робота. Так сказать начал делать его эстетичнее...
Я хотел дать этому роботу маленькое животное имя - и так как он ходил с помощью
шесть ног, я полагал, что это просто должны быть насекомое. Имея это в виду, я
посмотрел в сети на насекомых с длинной шеей. Богомол был наиболее близким
насекомым, которое я смог найти. И, так как животное, кажется, немного
застенчивое (она отворачивается, когда видит вас), я назвал ее МАНТИ: застенчивый богомол.
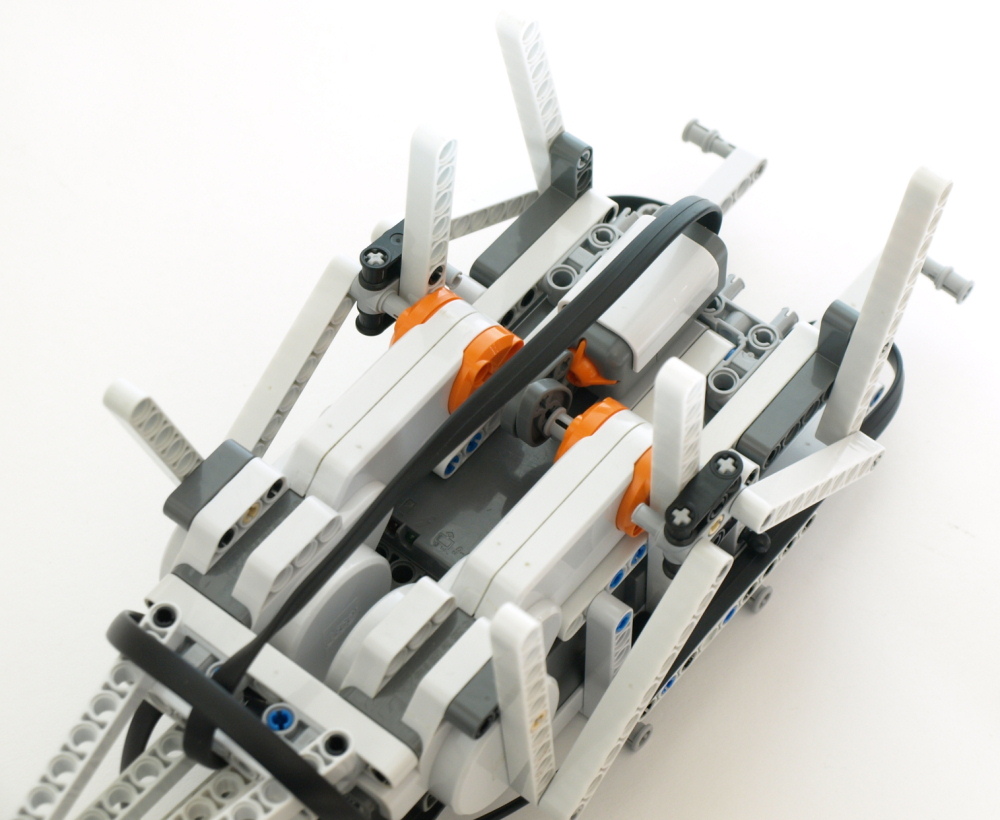
Робот состоит из нескольких модулей, которые ставятся вместе.
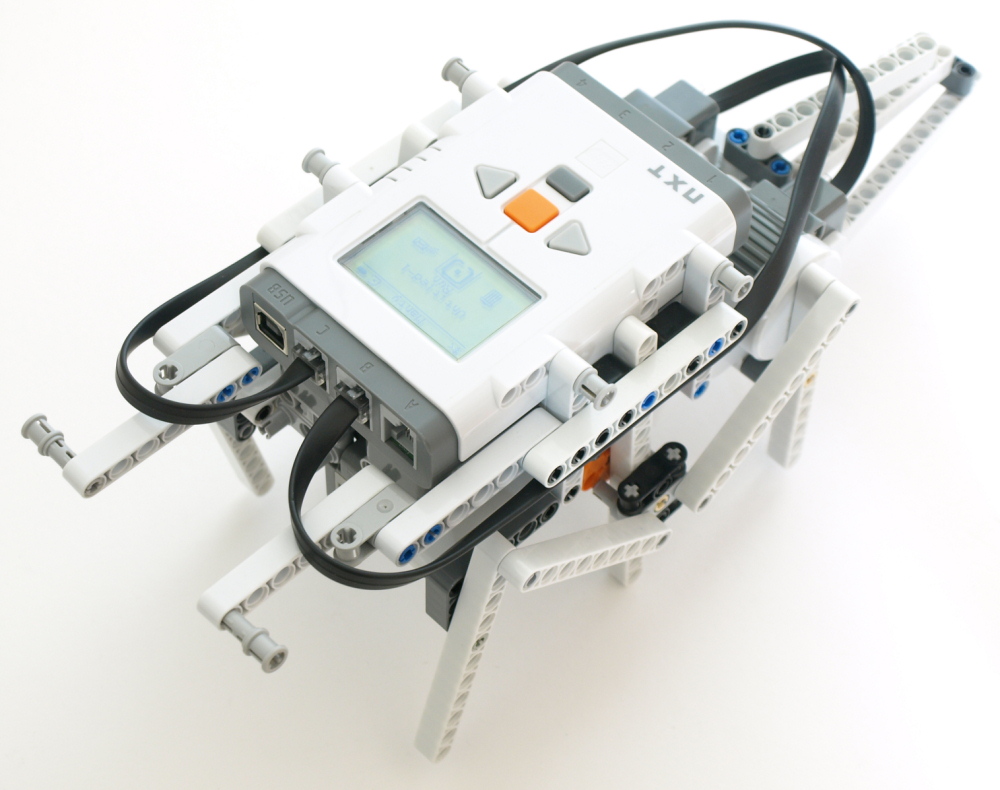
Датчик касания позволяет МАНТИ синхронизировать свои ноги до и во время ходьбы.
Если вы посмотрите на изображение справа, вы увидите, датчик касания,
установленный в нижней части МАНТИ. Это датчик позволяет синхронизовать ноги.
Подумайте об этом так - представьте себе, что ваши две ноги расположены параллельно друг-другу.
Если одна движется вперед, другая должен была бы сделать так же.
Но так не получится ходить! Тоже самое сначала получалось и у робота МАНТИ.
Таким образом, ноги по обе стороны (они идентичны) должны быть
на полшага друг от друга. Видео показывает, почему это необходимо, и как
осуществляется синхронизация.
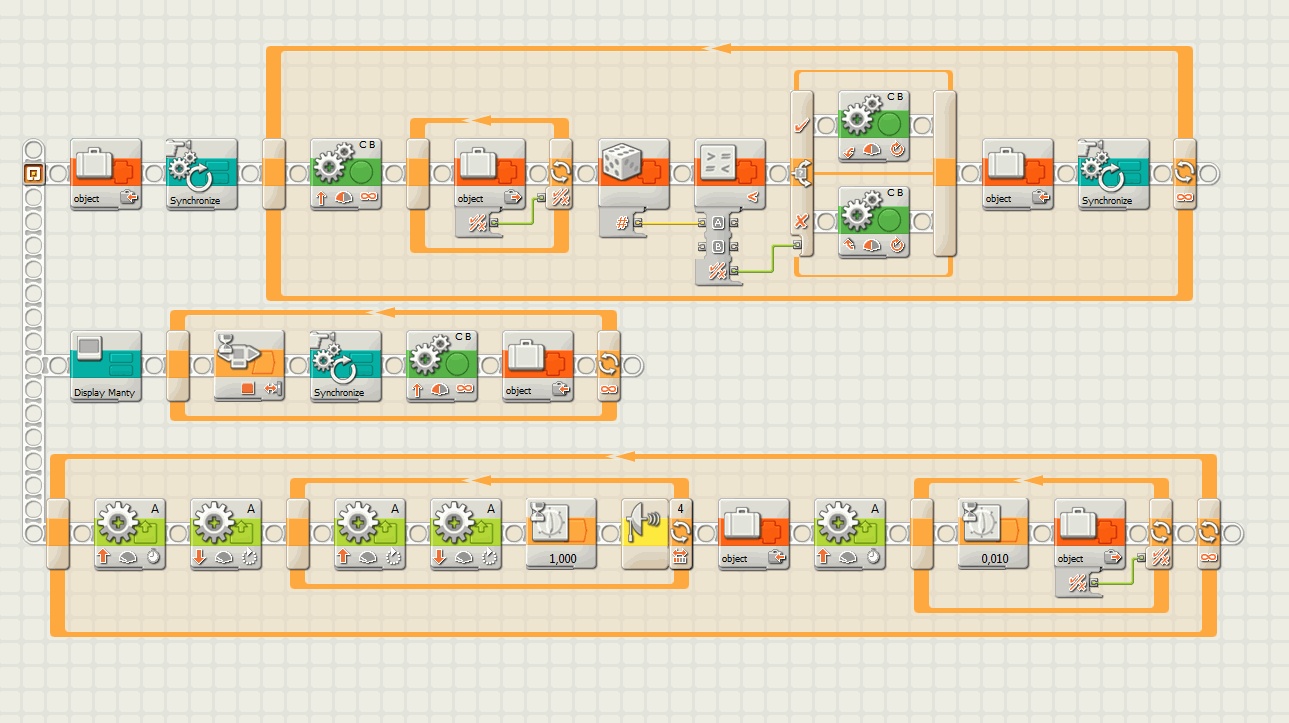
Инструкция по строительству
Скачать пошаговую инструкцию можно по ссылке. МАНТИ может быть построен только из частей набора MINDSTORMS NXT 2.0.